1、一阶卡尔曼滤波器; 2、采用C语言编程; 3、适用于单片机AD采样后数据的滤波处理。
”单片机 滤波 AD采样 卡尔曼滤波器“ 的搜索结果
在STM8单片机上将ADC采样后的数据通过卡尔曼滤波,两组不同P、Q、R值得卡尔曼滤波效果对比。并将滤波后的数据通过串口发送出来。


1 ADC采样模型 假设ADC采样的值已经为稳定状态,设k+1k+1k+1时刻ADC采样值为Xk+1Xk+1X_{k+1},则kkk时刻ADC采样值为XkXkX_k,假设k+1k+1k+1时刻的采样值为Zk+1Zk+1Z_{k+1},则有: {Xk+1=Xk,Zk+1=Xk+1+δ,δ为...
卡尔曼滤波器在ADC采样中的运用 C语音代码(本代码仅供学习参考使用,若需要优化后的代码,留言私聊博主) 代码中使用的Q值和R值滤波收敛速度慢,滤波效果较为滞后,需要对代码进行修改后方可使用,修改后的效果...



stm32单片机AD采集常用的十种滤波算法


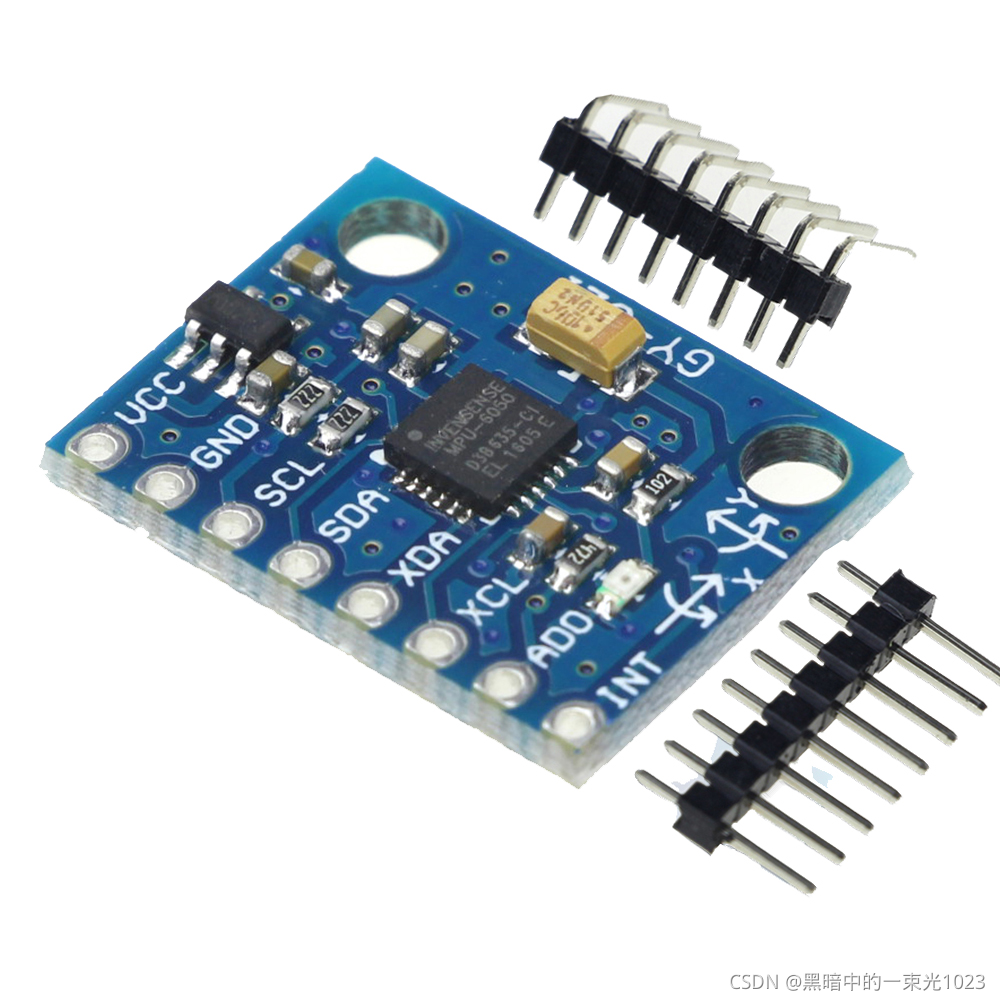
首先要明确,MPU6050 是一款姿态传感器,使用它就是为了得到待测物体(如四轴、平衡小车) x、y、z 轴的倾角(俯仰角 Pitch、滚转角 Roll、偏...本帖主要介绍三种姿态融合算法:四元数法 、一阶互补算法和卡尔曼滤波...
STM32自带AD采样滤波方法 本方法实测有效,可以提高转换精度。数据采集滤波求平均值的方法也可以用于其他专业AD转换芯片。如果转换要求高精度,必须注意REF参考源电压的稳定性。 uint32_t ADC_Single_Convert(void) ...
滤波算法一(C代码)
标签: 滤波算法
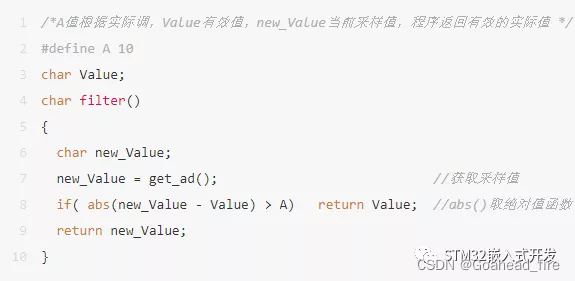
一阶滞后滤波算法、限幅滤波法(又称程序判断滤波法)、中位值滤波法、算术平均滤波法、递推平均滤波法(又称滑动平均滤波法)、中位值平均滤波法(又称防脉冲干扰平均滤波法)、限幅平均滤波法、加权递推平均滤波法...
基于STM32的ADC采样及各式滤波实现,滤波包含:一阶补偿滤波,算术平均滤波,中位值滤波,限幅平均滤波,滑动平均滤波和卡尔曼滤波。滤波可直接调用API函数,方便快捷。

我们通过 I2C 读取到 MPU6050 的六个数据(三轴加速度 AD 值、三轴角速度 AD 值)经过姿态融合后就可以得到 Pitch、Roll、Yaw 角。 本帖主要介绍三种姿态融合算法:四元数法 、一阶互补算法和卡尔
详解STM32+MPU6050姿态解算—附3个算法源码—卡尔曼滤波+四元数法+互补滤波——可应用在无人机/平衡车/机器人等方面
文章目录滤波算法限幅滤波限幅平均滤波中位值滤波中位值平均滤波算术平均滤波递推平均滤波加权平均递推滤波一阶滞后滤波(低通滤波)限幅消抖滤波卡尔曼滤波 滤波算法 我们需要精确的数据,但是数据回传并不完全准确...
新一年的算法更新季又来了,这一次tbus的优化侧重点任然放在【状态估计】方面。 去年推出了tiny_ekf主要侧重点在飞的稳不稳方面,而今年由于业务量的增加,估计精度的需求也凸显出来。 我们直接进入主题: ...
void AD7606Init(void) //AD06060初始化函数 { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOB|RCC_AHB1Periph_GPIOC|\ RCC_AHB1P...
程序是原子的AD采样程序,没动,开发板是战舰开发板。 只是把AD接口接入了一个电位器,电位器两端分别接电源跟地。数值在10次平均值滤波的时候跳动幅度是20以内,100是10以内,200次就变成了上下浮动三,并且频率慢...


一、arduino版 限幅滤波法(又称程序判断滤波法) 中位值滤波法 ... 新增加 卡尔曼滤波(非扩展卡尔曼) 程序默认对int类型数据进行滤波,如需要对其他类型进行滤波,只需要把程序中所有int替换成l...

HX711压力传感器学习(STM32)
推荐文章
- 1N5819-ASEMI轴向肖特基二极管1N5819-程序员宅基地
- 把maven的setting配置文件改为需要jdk版本_<profile> <id>jdk-1.4</id> <activation> <jdk>1.4</-程序员宅基地
- 使用matlab进行DBscan聚类_dbscan聚类分析图用什么软件-程序员宅基地
- 探秘技术新星:BBS_admin - 一个现代化的论坛后台管理系统-程序员宅基地
- 【译】JavaScript 开发者年度调查报告-程序员宅基地
- 神仙级渗透测试入门教程(非常详细),从零基础入门到精通,从看这篇开始!_网络渗透技术自学-程序员宅基地
- 多个protocbuf版本切换_protobuf调整版本-程序员宅基地
- msf+cobaltstrike联动(一):把msf的session发给cobaltstrike-程序员宅基地
- C语言--编写程序,输入一个整数,判断它能否被3,5,7整除_编程序实现功能:输入一个整数,判断其是否能同时被3、5、7整除。能被整除则输出“y-程序员宅基地
- 数据技术之Hadoop(HFDS文件系统)-程序员宅基地